|
1
|
- A. Farina, S. Fontana, P. Martignon, A. Capra, C. Chiari
- Industrial Engineering Dept., University of Parma, Italy
|
|
2
|
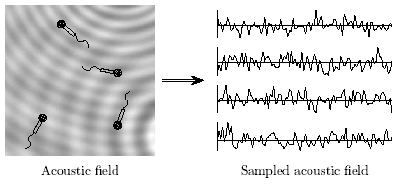
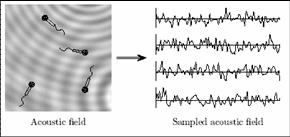
- Whatever theory or method is chosen, we always start with N microphones,
providing N signals xi, and we derive from them M signals yj
- And, in any case, each of these M outputs can be expressed by:
|
|
3
|
|
|
4
|
- The processing filters hij are usually computed following one
of several, complex mathematical theories, based on the solution of the
wave equation (often under certaing simplifications), and assuming that
the microphones are ideal and identical
- In some implementations, the signal of each microphone is processed
through a digital filter for compensating its deviation, at the expense
of heavier computational load
|
|
5
|
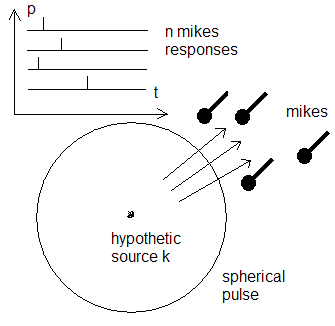
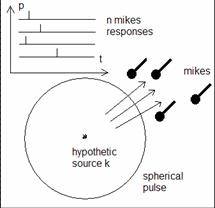
- No theory is assumed: the set of hij filters are derived
directly from a set of impulse response measurements, designed according
to a least-squares principle.
- In practice, a matrix of filtering coefficients, is formed, and the
matrix has to be numerically inverted (usually employing some
regularization technique).
- This way, the outputs of the microphone array are maximally close to the
ideal responses prescribed
- This method also inherently corrects for transducer deviations and
acoustical artifacts (shielding, diffractions, reflections, etc.)
|
|
6
|
|
|
7
|
|
|
8
|
|
|
9
|
- For computing the matrix of N filtering coefficients hik, a
least-squares method is employed.
- A “total squared error” etot is defined as:
|
|
10
|
- During the computation of the inverse filter, usually operated in the
frequency domain, one usually finds expressions requiring to compute a
ratio between complex spectra (H=A/D).
- Computing the reciprocal of the denominator D is generally not trivial,
as the inverse of a complex, mixed-phase signal is generally unstable.
- The Nelson/Kirkeby regularization method is usually employed for this
task:
|
|
11
|
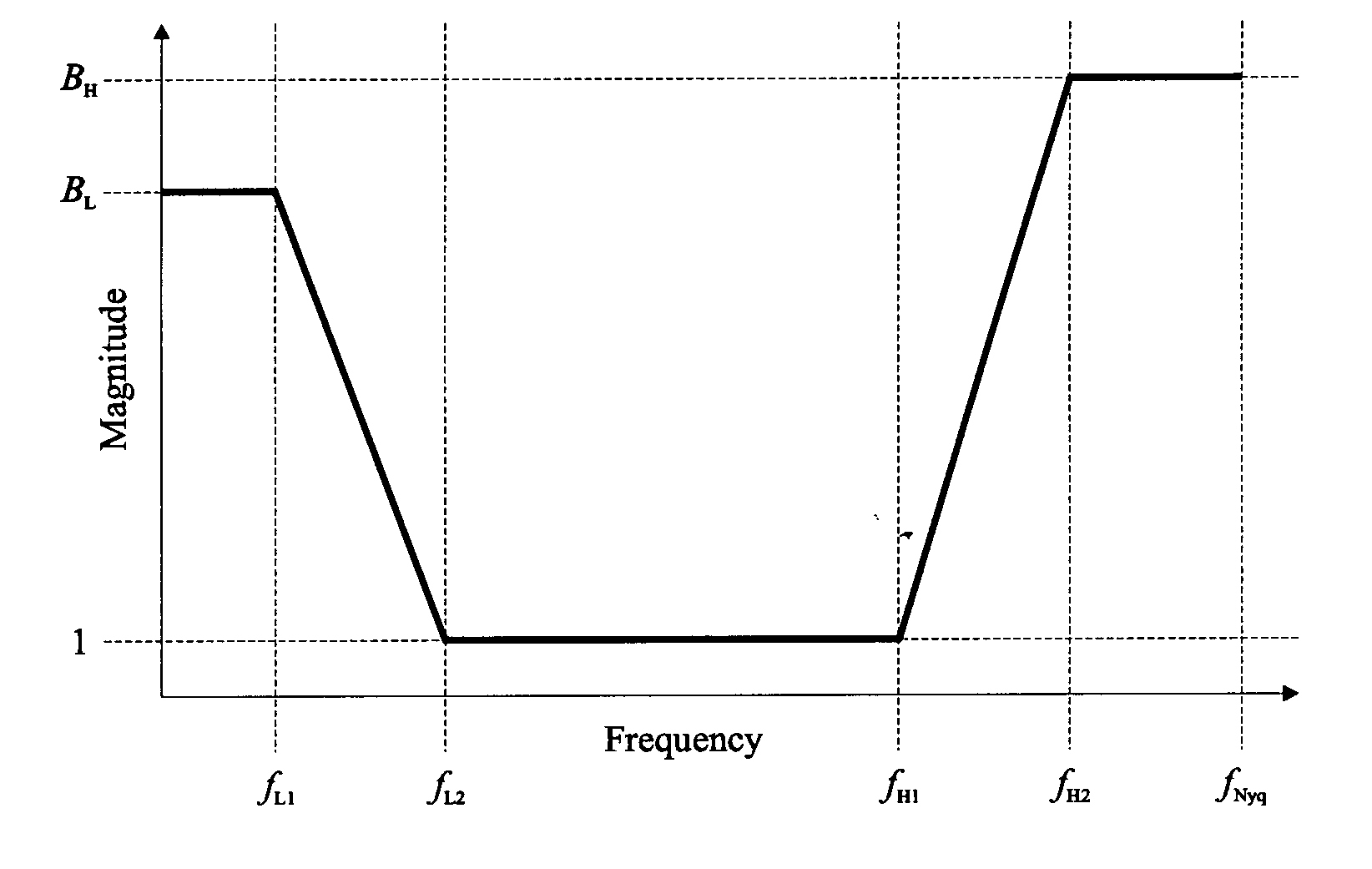
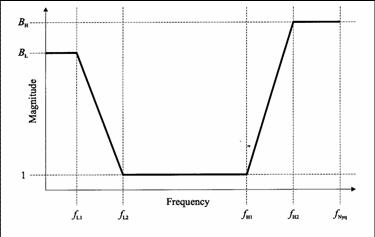
- At very low and very high frequencies it is advisable to increase the
value of e.
|
|
12
|
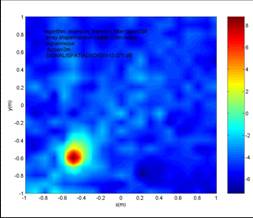
- LOW frequencies: wavelength longer than array width - no phase
difference between mikes - local approach provide low spatial resolution
(single, large lobe) - global approach simply fails (the linear system
becomes singular)
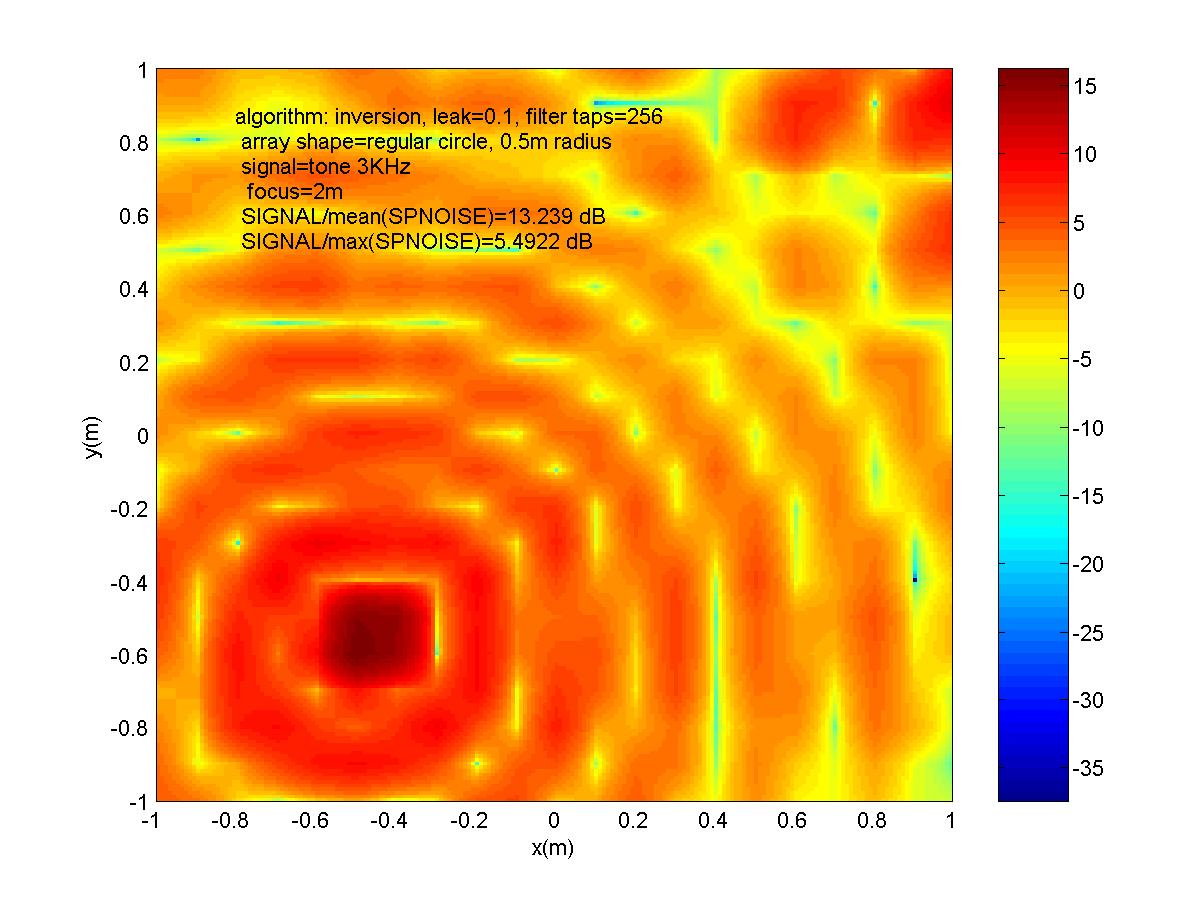
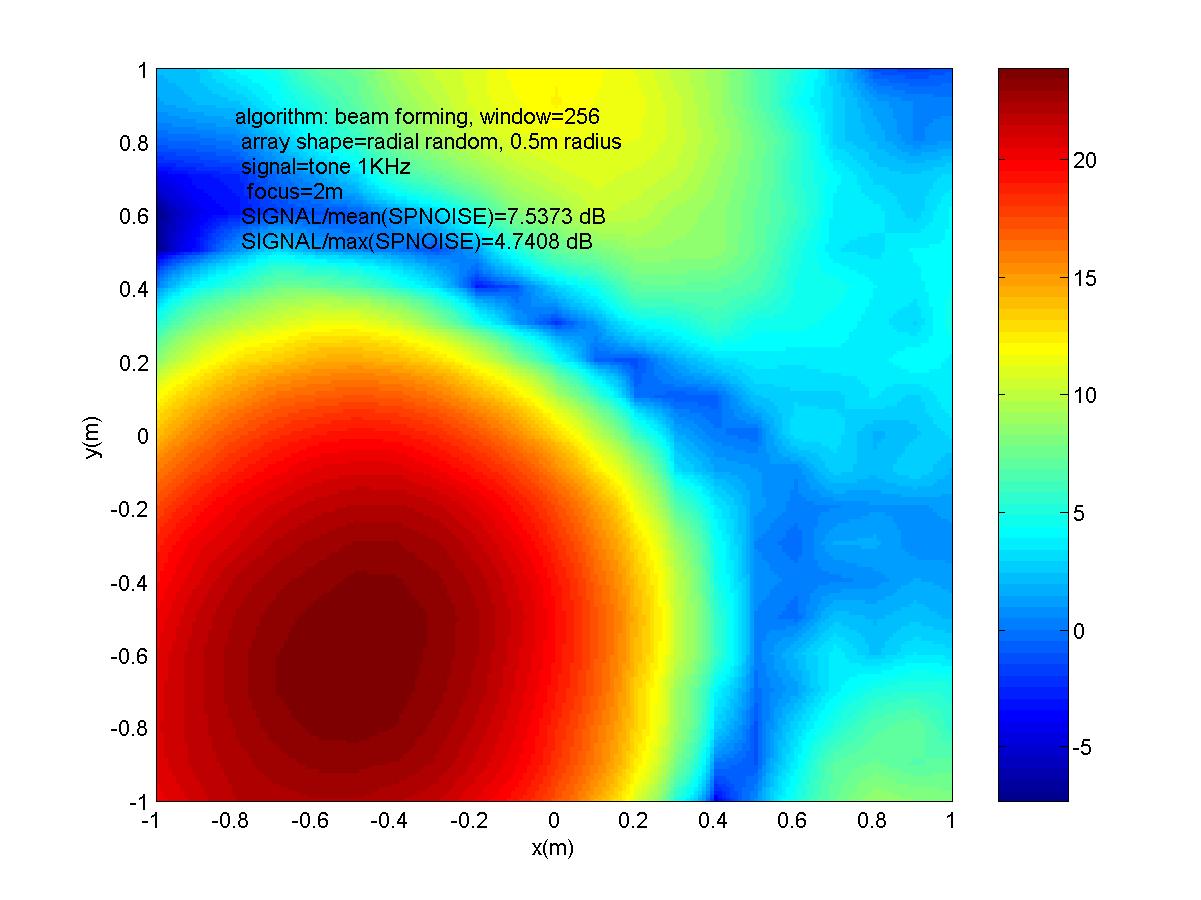
- MID frequencies: wavelength comparable with array width -with local
approach secondary lobes arise in spherical or plane wave detection
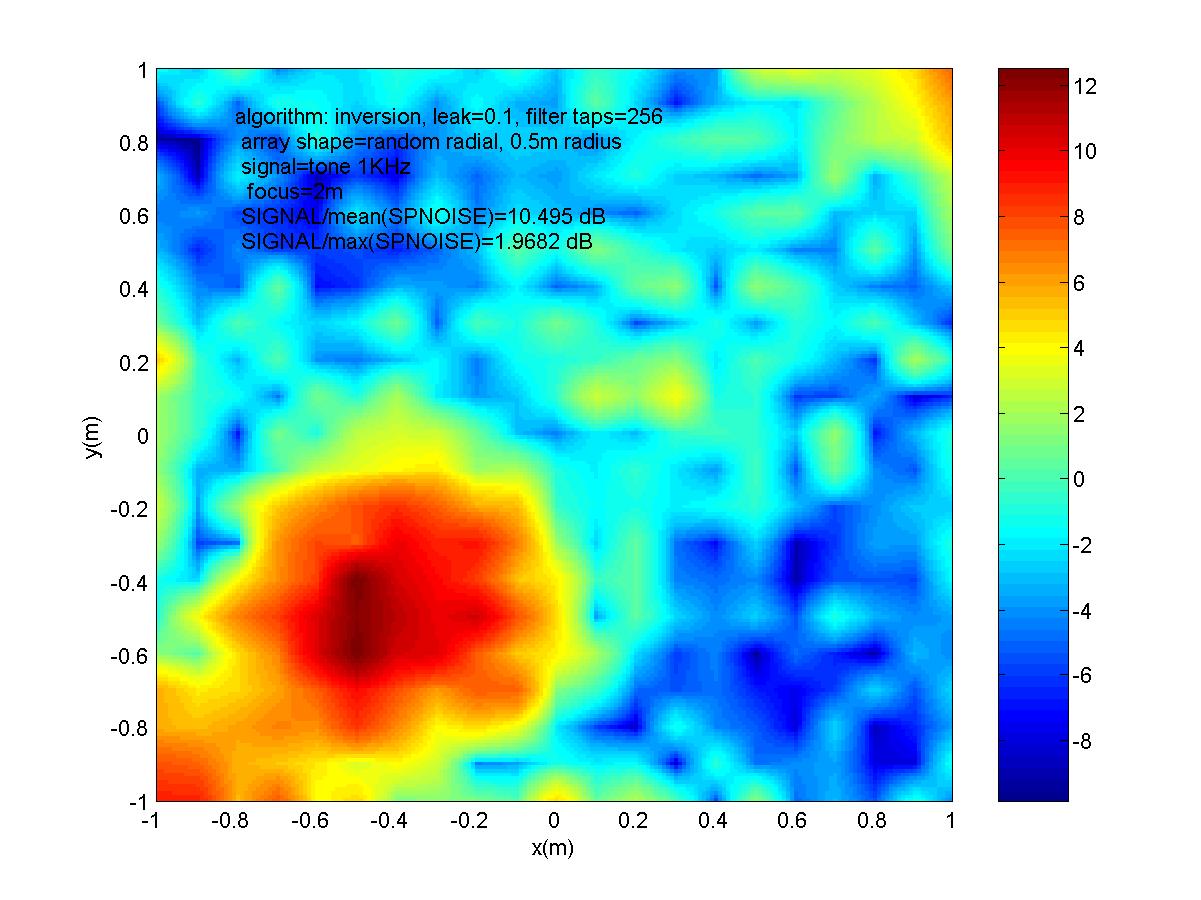
(negligible if the total bandwidth is sufficiently wide) - the global
approach works fine, suppressing the side lobes, and providing a narrow
spot.
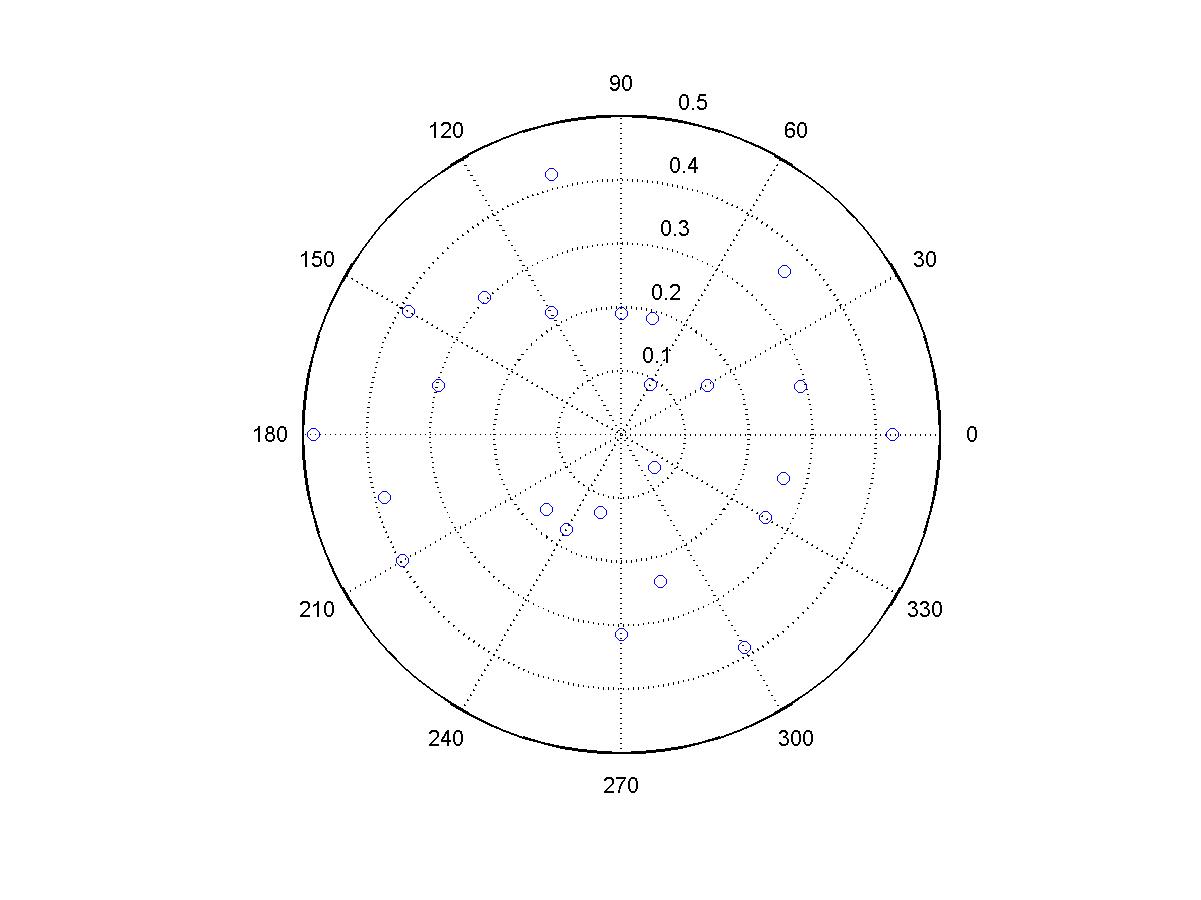
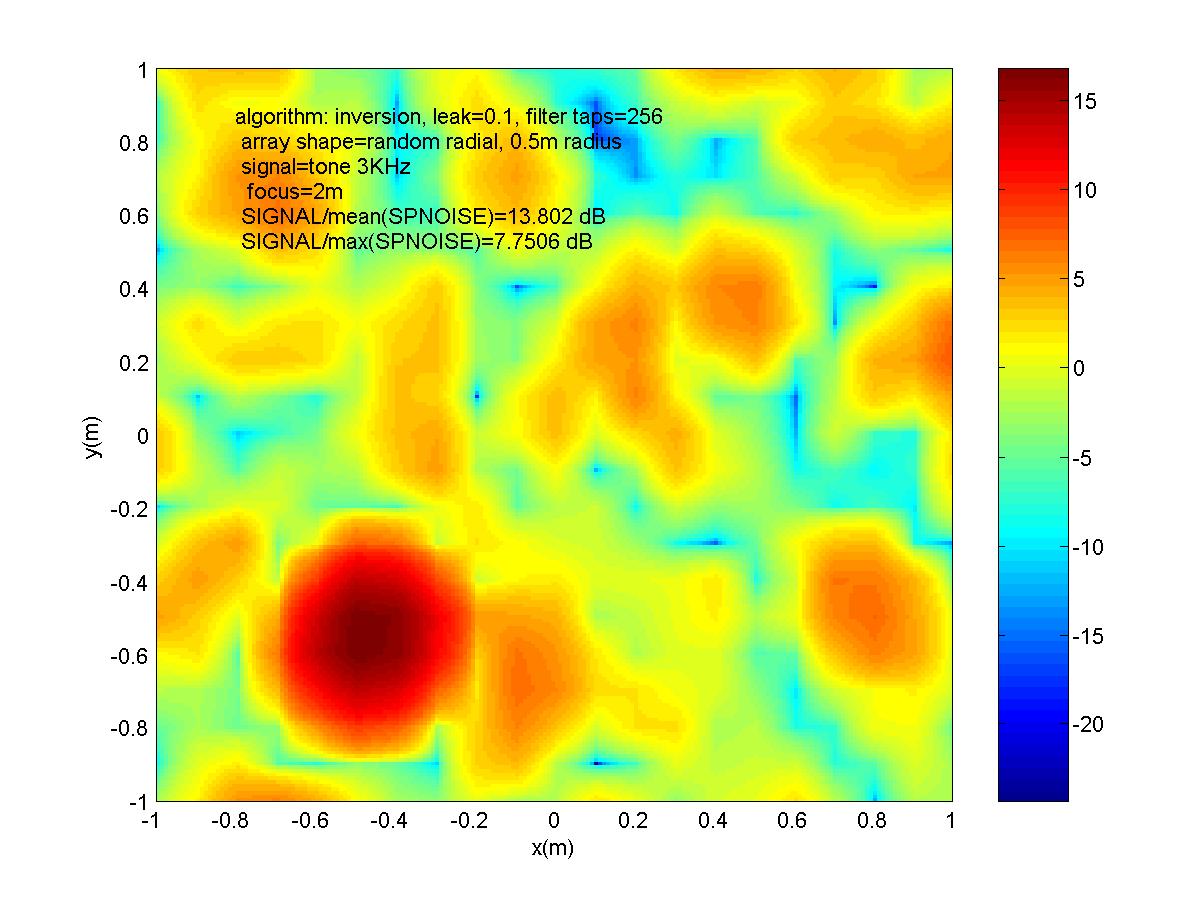
- HIGH frequencies: wavelength is shorter than twice the average mike
spacing (Nyquist limit) - spatial undersampling - spatial aliasing
effects – random disposition of microphones can help the local approach
to still provide some meaningful result - the global approach fails
again
|
|
13
|
|
|
14
|
|
|
15
|
|
|
16
|
|
|
17
|
|
|
18
|
|
|
19
|
|
|
20
|
|
|
21
|
|
|
22
|
|
|
23
|
|
|
24
|
|
|
25
|
|
|
26
|
|
|
27
|
|
|
28
|
|
|
29
|
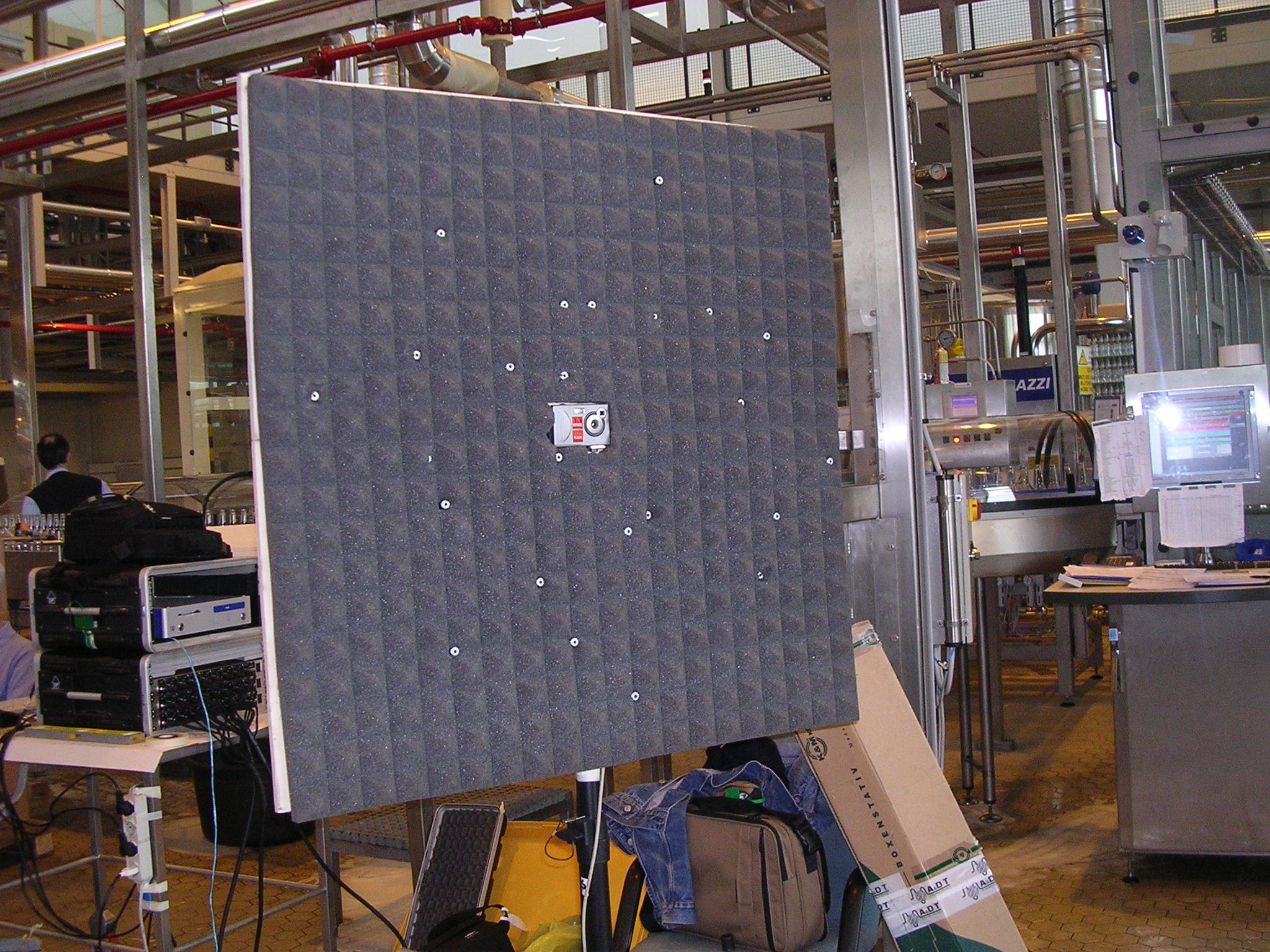
- DPA-4 A-format microphone
- 4 closely-spaced cardioids
- A set of 4x4 filters is required for getting B-format signals
- Global approach for minimizing errors over the whole sphere
|
|
30
|
|
|
31
|
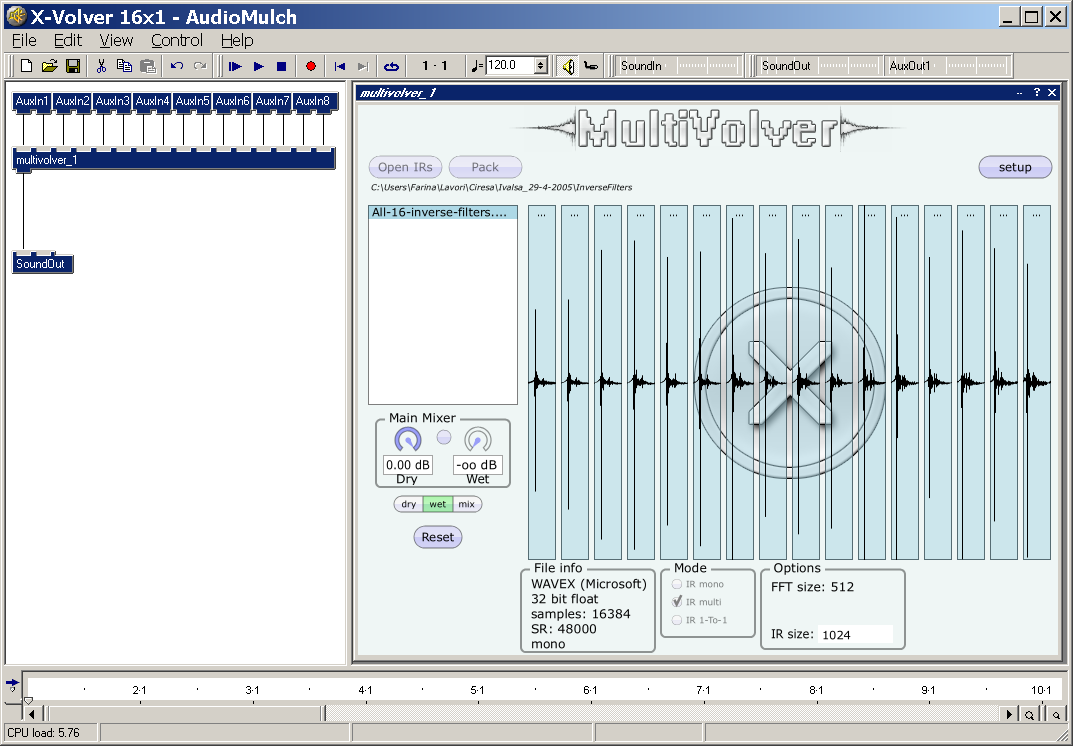
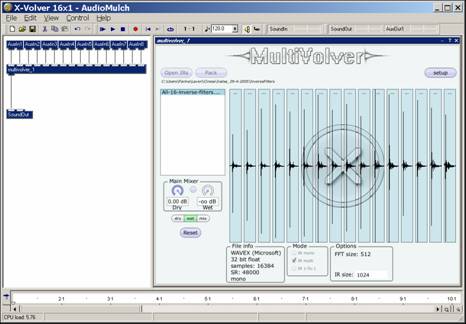
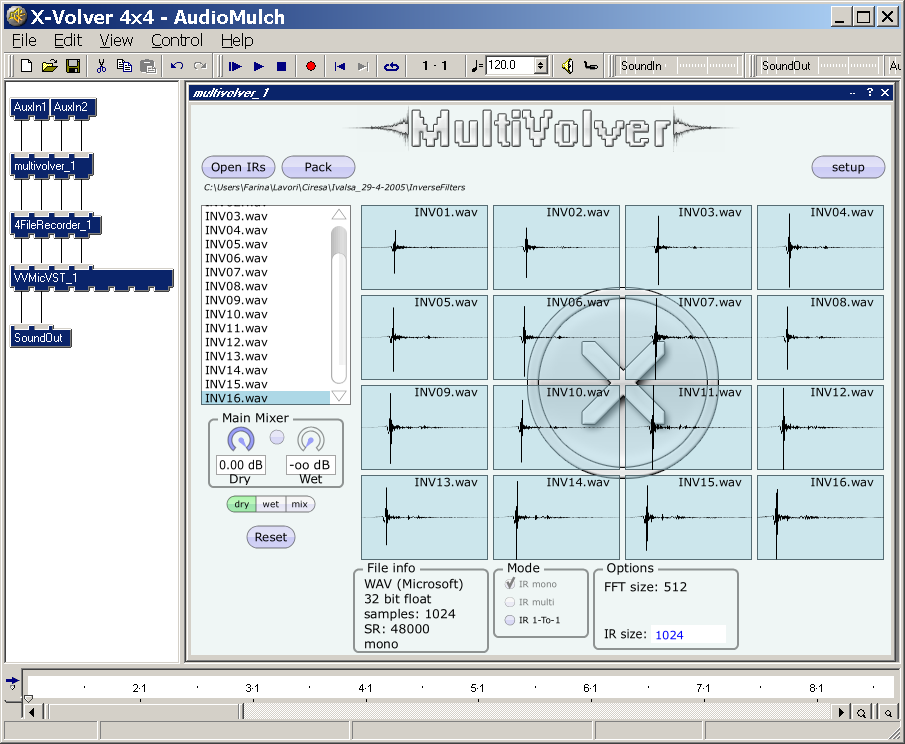
- A set of 16 inverse filters is required
(4 inputs, 4 outputs)
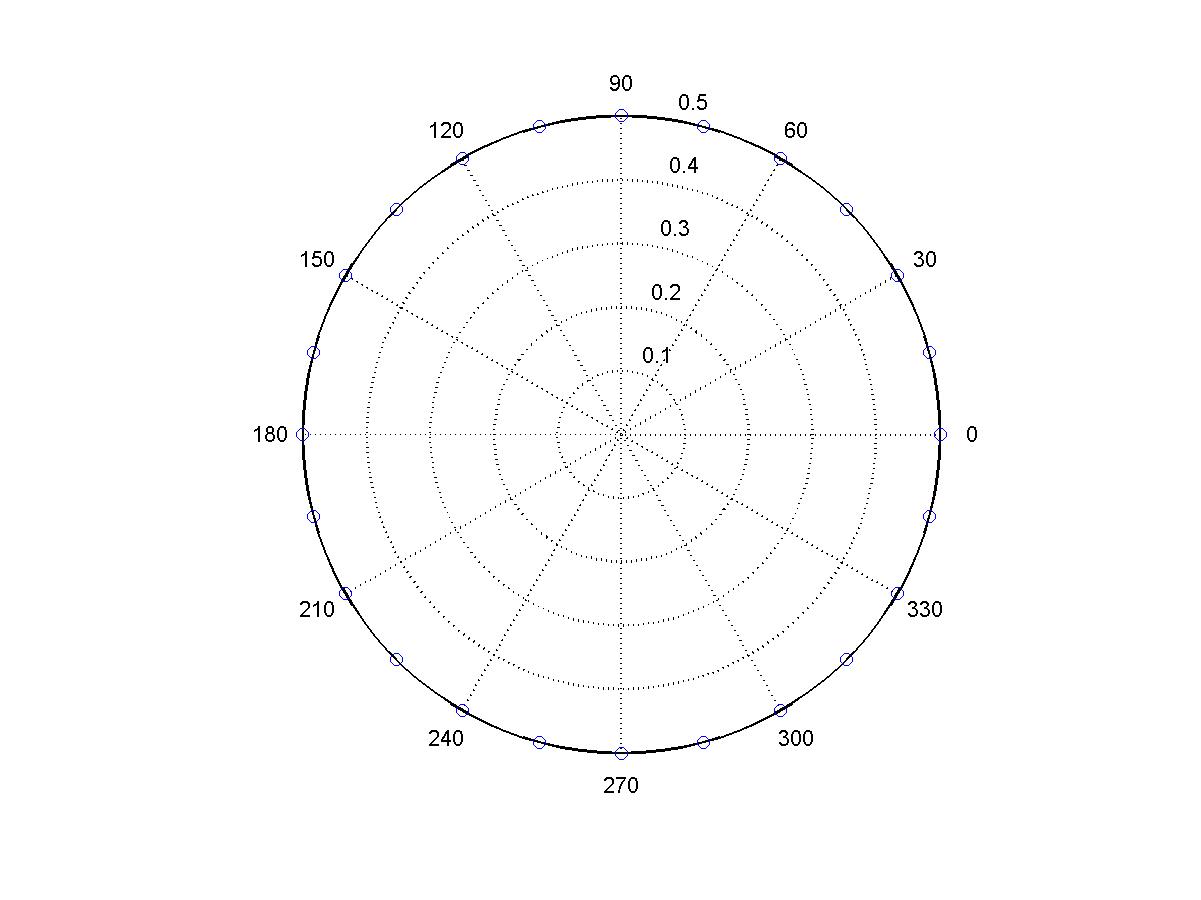
- For any of the 84 measured directions, a theoretical response can be
computed for each of the 4 output channels (W,X,Y,Z)
- So 84x4=336 conditions can be set:
|
|
32
|
|
|
33
|
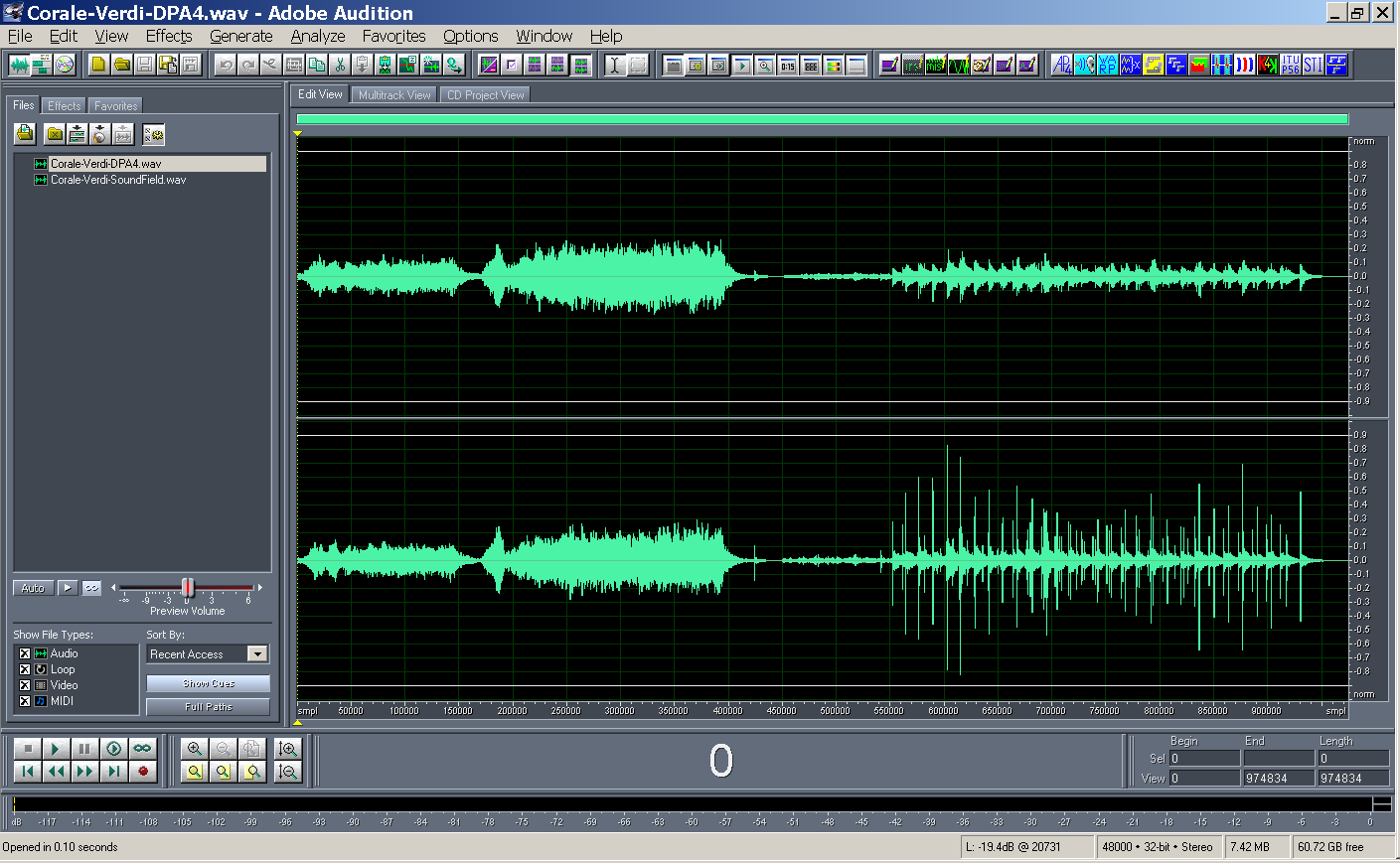
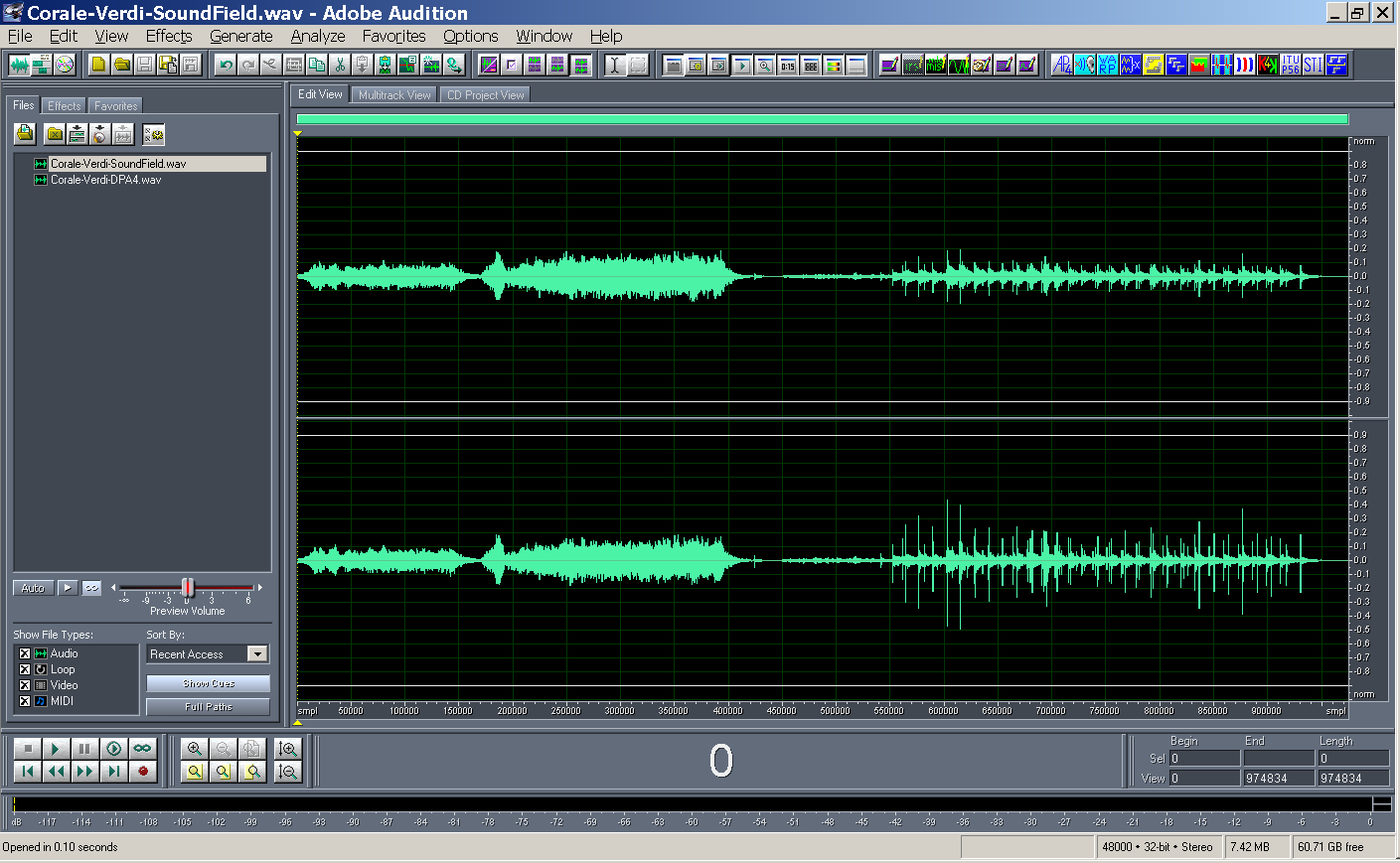
- 2 crossed Neumann K-140 were compared with a pair of virtual cardioids
derived from B-format signals, recorded either with a Soundfield ST-250
and with the new DPA-4
|
|
34
|
- The new DPA-4 outperforms the Soundfield in terms of stereo separation
and frequency response, and is indistinguishable from the “reference”
Neumann cardioids
|
|
35
|
- The numerical approach to array processing does not require complex
mathematical theories
- The quality of the processing FIR filters depends strongly on the
quality of the impulse response measurements
- The method allows for the usage of imperfect arrays, with low-quality
transducers and irregular geometry
- A new fast convolver has been developed for real-time applications
|
|
36
|
- A new 24-microphones array is being assembled, employing 24 high quality
B&K 4188 microphones
|
|
37
|
- The Multivolver VST plugin will be improved (Intel IPP 5.0 FFT
subroutines, multithread, rebuffering for employing larger FFT blocks
even when the host block is limited)
- Fast switching of the set of impulse responses will be added, with MIDI
control of the running set (for head-tracking, or realtime
spatialisation simulating movement of sources or receivers)
- A new standalone program will be developed for speeding up the
computation of the sets of inverse filters (the actual Matlab
implementation is very slow and unfriendly)
|

 Notes
Notes{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}